Research Areas
This page presents an overview of ongoing research areas without dedicated projects. They are usually coupled with a PhD thesis.

This page presents an overview of ongoing research areas without dedicated projects. They are usually coupled with a PhD thesis.

API Specific Automatic Program Repair or how can we find and fix API Misuses automatically?Nowadays, programmers re-use much code from existing code libraries by means of Application Programming Interfaces (APIs). Due to missing or outdated documentation as well as misunderstandings on how to correctly use a particular API, programmers may falsely apply that API.

In modern software and systems engineering formal verification gets more and more important to ensure safeness of safety critical systems. Especially, if the systems get in contact with human beings. Therefore, we research for new techniques in the domain of formal verification for software intensive systems.

Industrial surface processing by robots - applications such as cleaning, material removal or painting - are characterized by low automation level and consequently remain manually intensive. For automated robot control in such applications we need a solution of the Coverage Path Planning (CPP) problem, which could be performed either off-line or on-line.
This research investigates the current state of the art in fine-grained open-world recognition (i.e., retail product recognition) and aims to improve its accuracy.

Deep Learning systems have shown remarkable performance across a wide range of tasks in various domains, including computer vision and natural language processing. Despite these successes, recent theoretical studies and high-profile incidents, such as accidents involving self-driving vehicles, have highlighted that Deep Learning models can sometimes fail unexpectedly and without apparent cause.
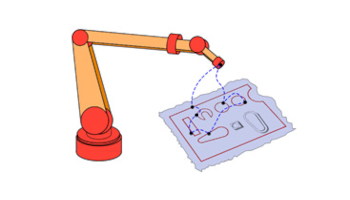
Many industrial effective tasks, e.g., welding, cutting, allow a certain freedom during their execution, e.g., the robot’s tool might have a certain deviation during welding. This freedom can be used as an extra degree of freedom for robot trajectory optimization. In this project, we formalize these tasks and optimize robot trajectory.
In early stages of software engineering projects, several fundamental decisions must be made. At the same time, there exists a number of potentially antagonistic goals and/or requirements. If these decisions are not simply yes/no decisions, but are numerical in nature, then it is necessary to find an optimal configuration in the design space.

Autonomous mobile robots gain more and more importance. In the nearest future, they will be a part of everyday life. Therefore, it is critical to make them as reliable and safe as possible even in an environment cluttered with unexpectedly moving obstacles.

Smart mobile devices are gaining widespread acceptance as displays sizes, computation power and mobile data transfer bandwidth increase. However, this also leads to new security issues. Here, we develop new bio-metric authentification methods. The core idea is to use soft keyboards as a biometric feature for authentification.

VECS is an Eclipse-based specification framework for the analysis of software-intensive systems. It includes an implementation of the SAML language and model transformations to verification engines. Currently, connectors to high-level Software Engineering tools (Rhapsody) are being developed.
Last Modification: 27.11.2023 -
Contact Person: Webmaster